Robot télécommandé
I) Introduction
Ce robot est le premier que je vais réaliser. Il sera donc relativement basique, et je l'améliorerai par la suite petit à petit.
Il sera fabriqué à partir d'un ancien robot télécommandé récupéré qui ne fonctionnait plus. Je récupère donc la télécommande, le moteur arrière (Moteur à courant continu entraînant les 2 roues), ainsi que le moteur avant (Servomoteur permettant de faire pivoter les roues).
Voici quelques photos des composants récupérés :
Le moteur à courant continu :
L'axe permettant de pivoter les roues avant (ici sans le servomoteur) :
La telecommande démontée et utilisée avec la carte d'expérimentation pour PIC :


Voici le synoptique pour la commande du robot :
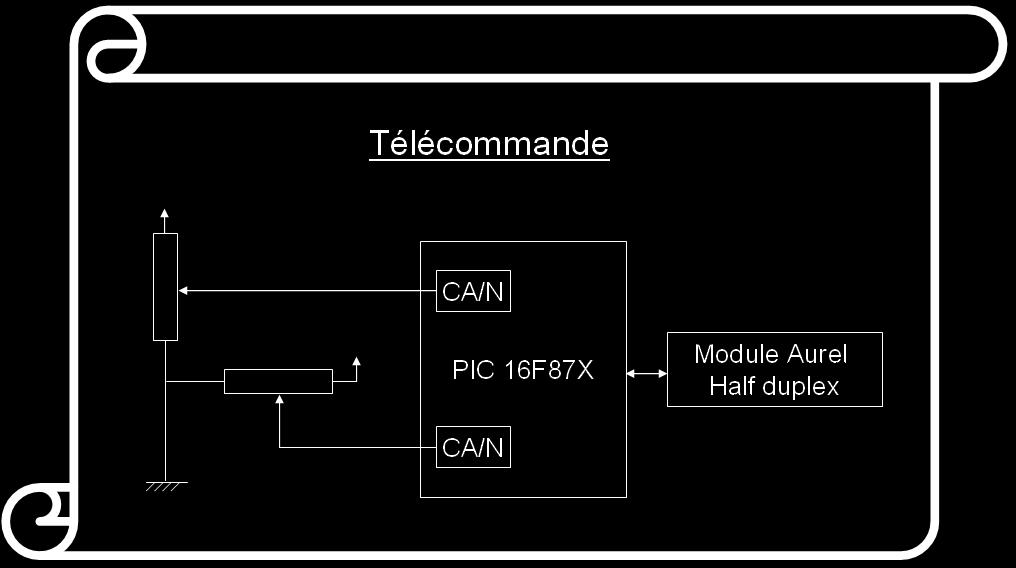
Pour réaliser la télécommande, le principe consiste à récupérer les positions des deux potentiomètres, en effectuant des acquisitions analogique numériques et d'envoyer ces valeurs corrigés ou non par ondes radios à une seconde carte qui va commander les moteurs.

La carte commande moteur va récupérer les signaux transmis par ondes radios, et générer des signaux PWM qui vont permettre au travers d'étages de puissance commander les deux moteurs en fonction des valeurs des potentiomètres.
Nous pourrions utiliser simplement un module émetteur pour la télécommande et un module récepteur sur le robot, mais l'intérêt de mettre 2 modules Half duplex est que l'on va pouvoir effectuer une communication bidirectionnel. En effet, si par la suite on insère des capteurs de température, de pression, de luminosité... sur le robot, ou même une caméra, il est intéressant que le robot puisse nous transmettre toutes ces informations.